扫码分享
牙膏自动装盒机的开盒动作可以由许多机构实现,但是每一个机构及方案都具有其独特的特点和优缺点。因而应该根据生产实际的需要,市场供需关系的要求,结合其优缺点分析各种方案的可行性。以下是各种方案的具体描绘和优缺点的列举:
方案一:夹取式机器人或机械臂
由于刚刚卸下的牙膏盒基本上处在一种平整的状态,或者略微打开。可以用机器人或者机械臂,将牙膏盒两端夹起从而使得牙膏盒打开。即严格根据间歇运动的周期,输入程序,控制机器人或机械臂夹爪运动路径,既不能运动路程过小,达不到使牙膏盒完全打开,也不能要求运动路程过大,使得夹爪把牙膏盒挤扁变形,从而造成牙膏盒外观的破碎,降低合格率。
其优点是:
1、智能控制,可以的根据不同牙膏盒尺寸的大小,通过程序的输入使得牙膏盒完全打开。
2、可以适用于不同的生产需求,用途较广。
3、成功率较高,夹爪的运动位移和动作由程序控制,且易于执行到位。
缺点是:
1、成本高,机器人和机械臂的购买,维护,修理成本较高。
2、对于传动机构度要求较高,由于机器人或者机械臂由程序控制,如果传送带运动不到位会引起牙膏盒打开不到位或者是被夹爪挤扁。
方案二:往复运动的挡块
挡块的往复运动方向和传送带或传送链板的运动方向垂直,当略微打开的牙膏盒运动至指定位置时,挡块阻挡牙膏盒的正常运动,对牙膏盒起到一个阻拦的作用,从而使得牙膏盒撑开呈直立状态。待牙膏盒撑开后,挡块向反方向运动,使牙膏盒顺利通过。挡块的往复运动可由凸轮装置通过严谨的周期和运动状态计算控制,也可以通过物理上的光电门通过亮度的变化来检测出牙膏盒是否通过,继而控制挡块的往复运动。
其优点是:
1、结构简单,设计难度低。仅通过机械设备或简单的计算即可达到目标。
2、维修和保养较为简易,仅通过常规的故障排查即可满足检验维修工作。
其缺点是:
1、精度较低。由于是机械设备计算和控制,易受到传送带或是电机的转速影响,造成运动的不,不到位。
2、由于机械设备的计算和设计及周期的性,只能适用于一种情况的工作。若移动速度,牙膏盒尺寸及生产要求变化,需重新计算设计系统。
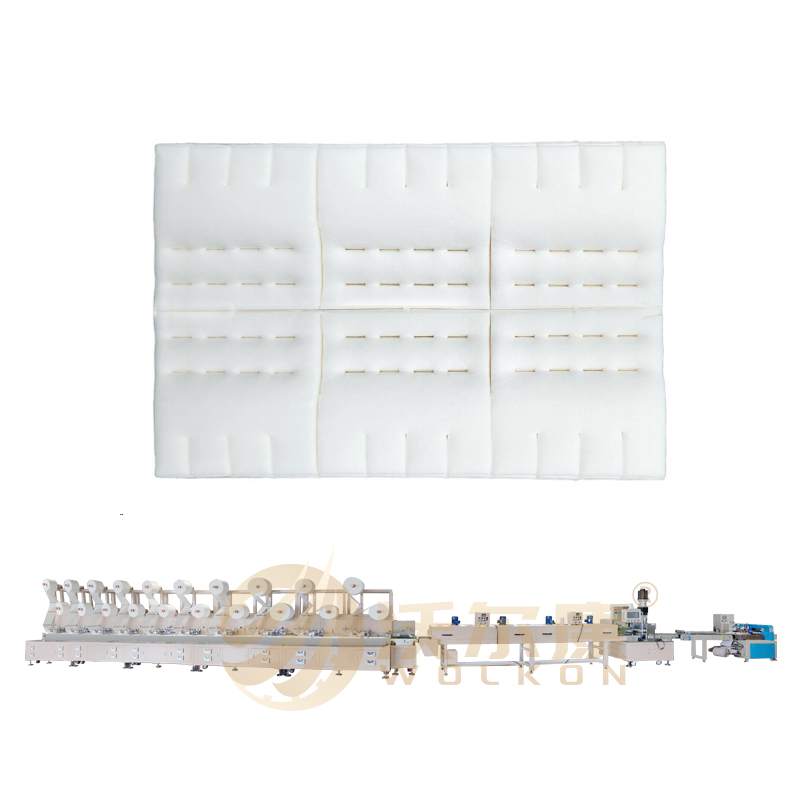
综上分析和比较,沃尔康自动装盒机一般采用第二种方案,可以和驱动传送带的电机相连接,通过凸轮机构控制挡块的往复运动和位移。如运动方向有改变或者是其他要求,可使用45°换向齿轮改变即可。且第二种方案较为简单,便于操作。
上一篇:食品装盒机工艺流程分析
下一篇:牙膏自动装盒设备结构说明